![]()








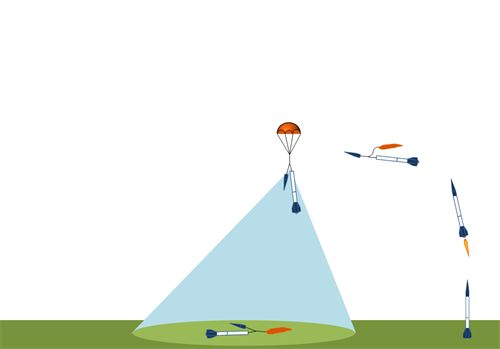
TSRPのロケットは打上げたロケットをパラシュートで降下させて回収し、再利用することを目指しています。 ロケットはロケットエンジンの力によって飛翔し、放物線を描いて飛んでいきます。 次に放物線の頂点でパラシュートを開き、地面にゆっくりと着地します。
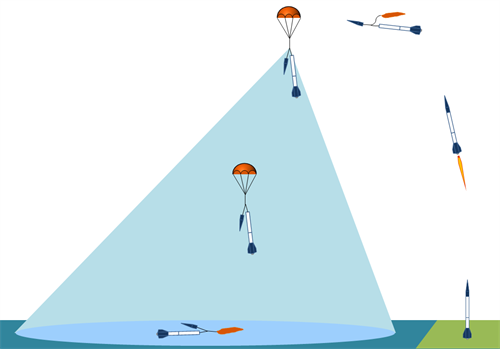
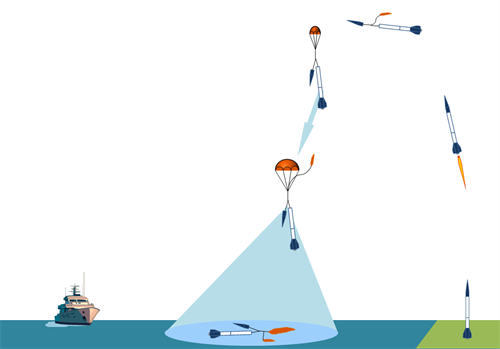
しかしロケットの到達高度が高くなると、ロケットが落下する可能性のある範囲が広がってしまい、広大な打上用地を確保しなければなりません。 日本国内では高度1 km以上の高度へ打上可能な用地が存在しないので、高度1 km以上へロケットを打上げるためには海岸から打上げて海に着水させる必要が生じます。 このようにロケットを海に着水させる打上げをTSRPでは「海打ち」と呼んでいます。 2012年夏に初の海打ちに成功しました。打ち上がったロケットは沖合で待機している漁船によって回収されます。
また、ロケットの落下範囲を狭める試みとして、二段階開傘システムを導入しています。 これは下の図のようにパラシュートを小さく降下速度の大きいパラシュートと、大きく降下速度の小さい着地用パラシュートの2回に分けて展開するシステムです。
Copyright 1995-2024 Tokai Student Rocket Project
If you have opinion etc... :tokai.srp/at/gmail.com